
용어 및 기호 설명
페이지 정보
작성자운영자 조회 1,896회 작성일 22-05-18 13:26본문

기술 혹은 기기의 어떤 변수의 값을 주변의 값들과 구분 할 수 있는 능력의 척도, 인접한 두 개의 물체를 별개의 것으로 구분 할 수 있는 최소거리.
위치 결정의 최소 단위를 말하고 최소 이동거리 또는 하나의 step에서 쪼개어 질수 있는 최소한의 거리 또는 각도.
현미경, 망원경, 사진, 렌즈 등 관찰 또는 촬영하는 대상의 세부를 상으로 판별 할 수 있는 능력, 또는 얼마나 세밀하게 분리하는 능력.
Accuracy 또는 Position accuracy라고도 한다. 정확도와 정밀도를 포함해서 정도라고도 하고, 여러번 측정하거나 계산하여 그 결과가 서로 얼마만큼 가까운 지를 나타내는 기준값이며,
명령위치와 실제 이동 위치사이의 최대 오차를 말하기도 한다.
리니어 스테이지의 구동부를 특정 위치로 보낼 때 정확하게 정지하는 정도인데, 예를 들어 100mm위치로 가라고 지령을 내렸는데 100.005에 멈출 수도 있고, 99.996에 멈출 수도 있는 것입니다. 보편적으로 위치 정밀도는 Laser interferometer를 사용하여 측정한다.
연속 명령된 리니어 스테이지의 구동부가 왕복운동을 할 때 같은 자리를 반복하여 위치 할 수 있는 정도.
Bi-Directional Repeatability : + 및 - 양쪽방향에 대한 연속적 이송에서의 위치 정밀도이다.
Uni-Directional Repeatability : 쪽 방향의 screw backlash 등의 영향을 무시한 값이다. 이값은 backlash등의 외부적 요인으로 Bi-Directional Repeatability보다는 그 수치가 낮다.
2개의 치차가 맞물리고 있을 때 그 배면에 생기는 틈새, 한쪽방향으로 회전하는 도중 역 방향으로 방향을 바뀌었을 때 생기는 기구적인 오차를 말한다.
이러한 백래쉬는 예압의 부족 혹은 동력전달 Gear의 맞물림의 이상 등에 의해 발생하며 그 값은 누적된다.
이러한 반복적인 백래쉬는 controller를 통해서 그 값만큼 보정해서 사용 할 수 있다.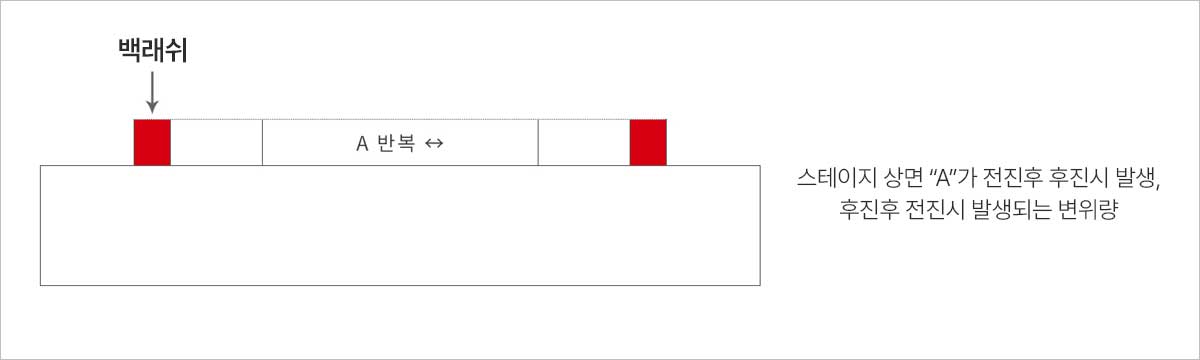
기존 축심과 동일한 직선위에 중심을 가져야 할 원통 부분에 있어서 그 원통 부분의 축심과 기존 축심의 오차의 크기를 말한다.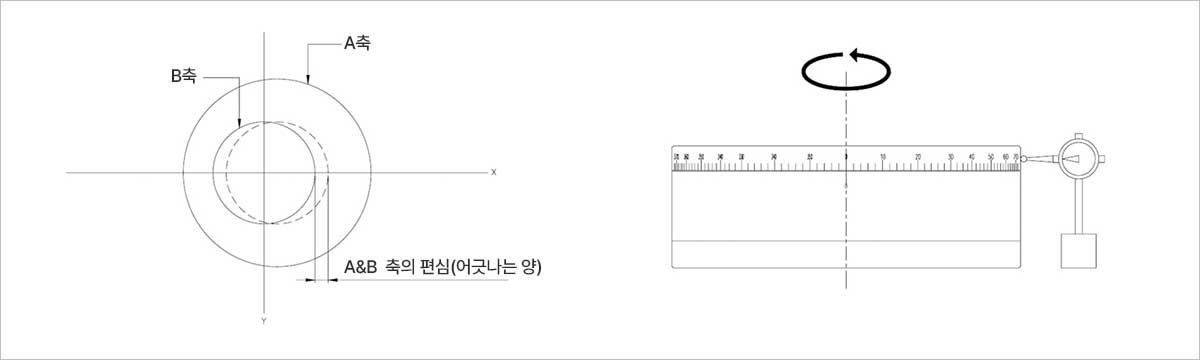
Rotary stage와 같은 중심축을 기준으로 하는 물체는 회전 할 경우 회전체의 중심선으로부터 변위가 일어나는데 회전축을 중심으로 움직이는 편차는 Run-out이고, 회전축을 중심으로 흔들리면서 회전축의 직각방향으로 면이 흔들리는 것을 wobble이라 한다.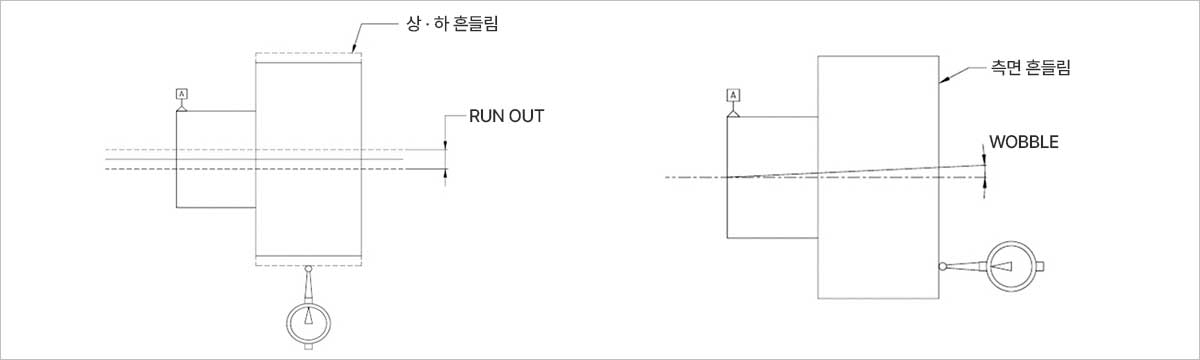
A시작점과 B종점까지 일정방향 순차적으로 위치를 결정 후 스테이지의 C부위가 일정 stroke전,후 작동시 수직방향(상,하)의 변위량(차이)을 측정하는 방법.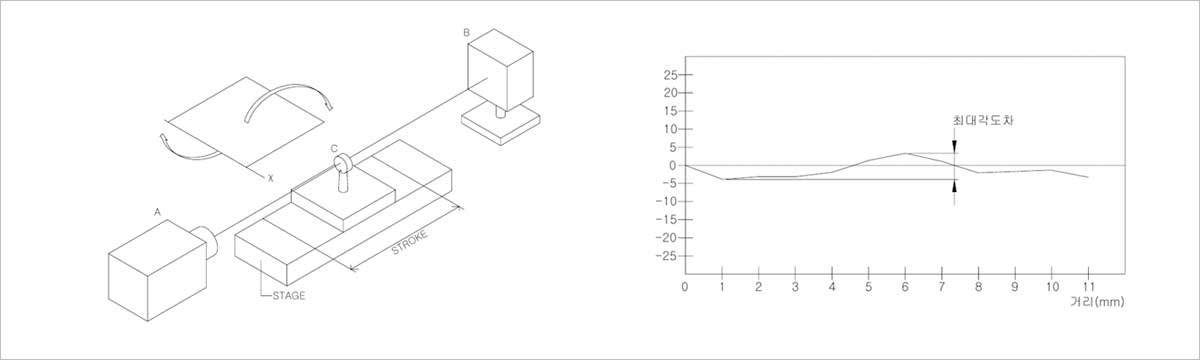
A시작점과 B종점까지 일정방향 순차적으로 위치를 결정 후 스테이지의 C부위가 일정 stroke전,후 작동시 수평방향(좌,우)의 변위량(차이)을 측정하는 방법.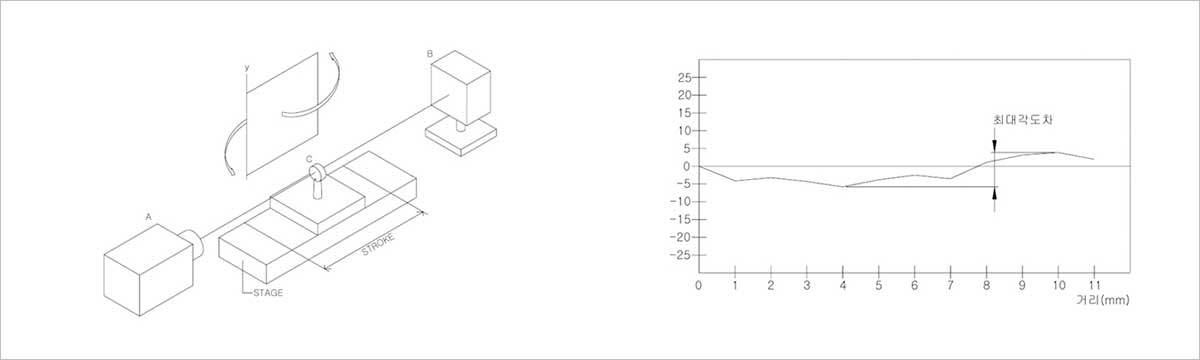
한 평면상에 있는 모든 표면이 기준면으로부터 얼마만큼 벗어나 있는가를 측정하는 값
ㅣ A ㅣ 0.03 ㅣ // ㅣ 데이텀 A를기준 사각 stage 상판 면적이 0.03mm안에 들어와야 된다는 기준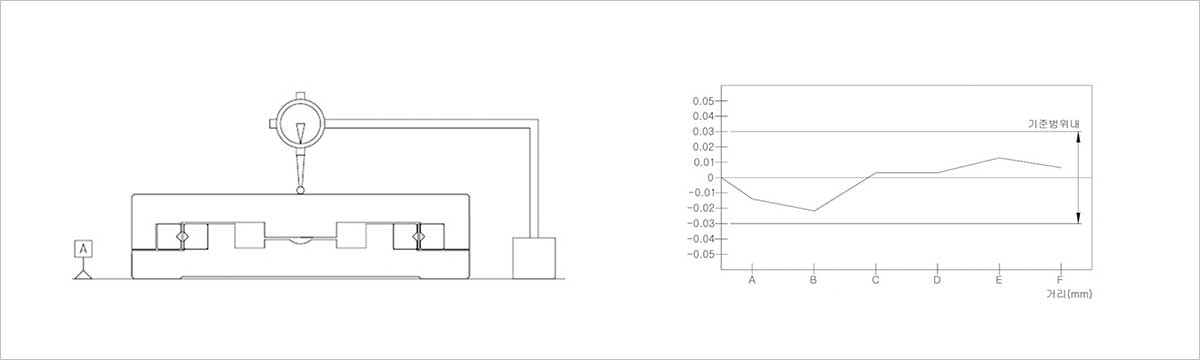
한 평면상에 있는 모든 표면이 기준면 A를 기준으로 상단부를 전,후 작동 하였을 때 기준면으로부터 변위량을 측정하는 값.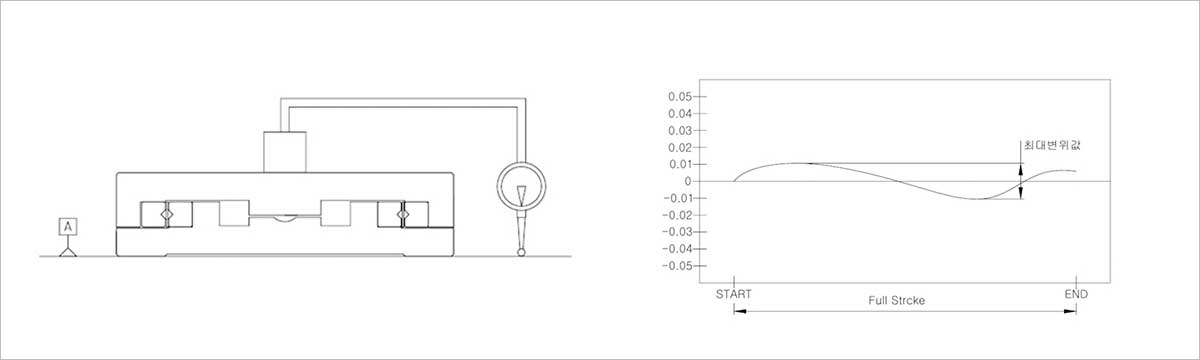
Fz’ : 스테이지면 내에서 탑재 가능한 하중
Fx’, Fy’ : 모든 기능이 유지되는 모멘트, 그 모멘트를 초과하면 기능에 영향을 미치는 값.
제품의 기준이 되는 위치(상판과 하판이 겹치는 위치)를 기준위치로서 +, -로 표현하며 최종적으로 스테이지가 작동가능한 거리를 말한다.
제품의 기준이 되는 위치(상판과 하판이 겹치는 위치)를 기준위치로서 +, -로 표현하며 최종적으로 스테이지가 작동가능한 거리를 말한다.
CW : Clockwise-시계방향
CCW : Counter clockwise-반시계 방향

